この記事では、マイクロビットとスクラッチを使って、物をつかんだり、電磁石で物を運ぶロボットアームを作成し、プログラムで自動的に動かす方法を紹介します。
最終的に、特定の物体を特定の位置に移動させるタスクを実行できるロボットの制作が目標です!
この自由研究を通じて、子どもはロボット工学とプログラミングの基本を学び、創造力と問題解決能力を伸ばすことができます。
子どもが自分の手でロボットを作り上げる喜びを感じながら、学びの楽しさを実感できることを願っています。
対象年齢:
必要なスキル:
所要時間:
得られる経験:

準備するもの
- マイクロビット(micro)
- スクラッチ(Scratch)対応のサーボモーター
- 電池パック(micro用)
- マイクロUSBケーブル
- スクラッチ(Scratch)インストール済みのパソコン
- クラフト用の素材(木材or段ボール、テープ、はさみ、ボンドなど)
- その他モーター等(記事の中で紹介)


やり方
ステップ1: 準備
すべての必要な素材を揃えましょう。
マイクロビットをUSBケーブルでパソコンに接続し、スクラッチを開きます。
接続方法がわからない方は、以下の記事をご確認ください。
スクラッチに「micro」拡張機能を追加します。

ステップ2: ロボットアームの作成
設計と組み立て
木材や段ボール、クラフト素材を使ってロボットアームの基本構造を設計します。
例えば、アーム部分は複数の段ボールを繋げて強度を持たせます。
サーボモーターを取り付け、動かすためのメカニズムを組み込みます。
サーボモーターの取り付け

サーボモーターをロボットアームの基部や関節部分に取り付けます。
例えば、サーボモーターを2つ使って、「ロボットアーム」をつくり、マイクロビットで制御させます。
アームを「左右」「上下」に動かせるようにします。
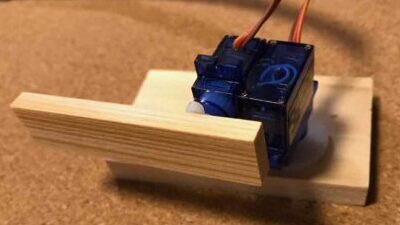
筐体には、2つのサーボモーターを、回転軸が90度ずれるように両面テープで貼り付けます。
マイクロビットとサーボモーターの接続
マイクロビットとサーボモーターをつなぎます。
マイクロビットとサーボモーターは電源電圧が異なるため、別々の電源を用いるか、電圧を変換する回路を使う必要があります。
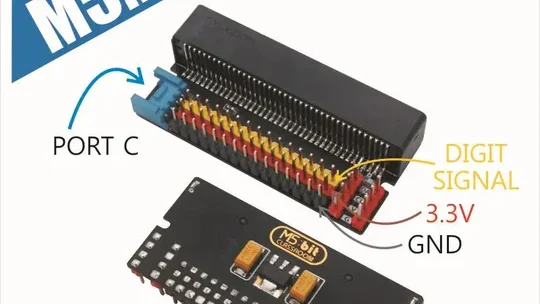
おすすめではないですが、単四型ニッケル水素電池3本(3本で3.6V)を直結して動かすことも可能です。「M5:Bit」を使うと、マイクロビットとサーボモーターを簡単に接続できます。
ステップ3: プログラミング
スクラッチの設定
パソコンでスクラッチを開き、「micro」拡張機能を追加します。
「新しいプロジェクト」を開始し、マイクロビットとサーボモーターを制御するための基本ブロックをドラッグします。
基本プログラムの作成
サーボモーターを特定の角度に動かすためのプログラムを作成します。
例えば、以下のように、ブロックを使用し、サーボモーターを30度に設定するスクリプトを追加します。
アームを「右方向に旋回」→「下降」→「上昇」→「左方向に旋回」→「下降」→「上昇」を繰り返します。

ロボットアームの動きのプログラム
ロボットアームが物をつかんだり持ち上げたりする動作をプログラムします。
例えば、ロボットアームの先端に電磁石を取り付け、ロボットアームでモノを運ばせることもできます。
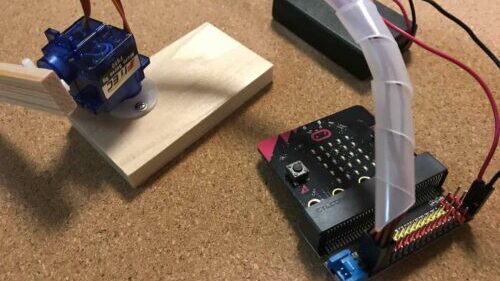
まず、電磁石をつくり、それをマイクロビットで操作します。

M4ネジ(長さ25mm)、エナメル線(2m)、プラスチック板(直径4mmの穴)を使い、電磁石をつくります。
M4ネジにプラスチック板2枚をとおし、端をナットで止め、ネジの軸にセロハンテープを何重かに巻いてから、エナメル線を巻いていきます。紙やすりでエナメル線の両端の皮膜をはがして、完成です。
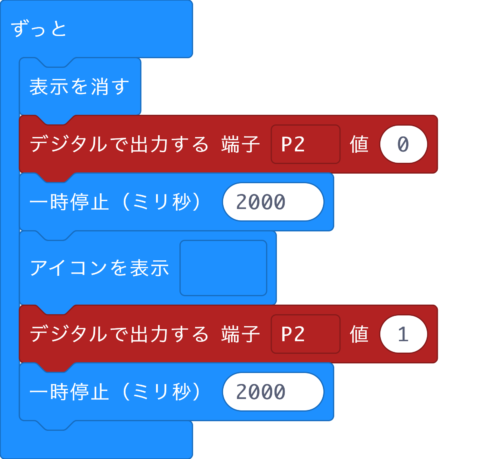
次に、マイクロビットに以下のプログラムを書き込みます。
2秒おきに「P2」を「0」にしたり「1」にしたりします。「1」の時だけアイコンを表示します。
最後に、乾電池とモータードライブモジュールの「プラス」「マイナス」を、それぞれ「M5:bit」の「V」「G」につなぎます。
モータードライバの「IN1」「IN2」を「M5:bit」の「2」と「G」に、モータードライバの「OUT1」「OUT2」を電磁石のふたつの端子につなぎます。
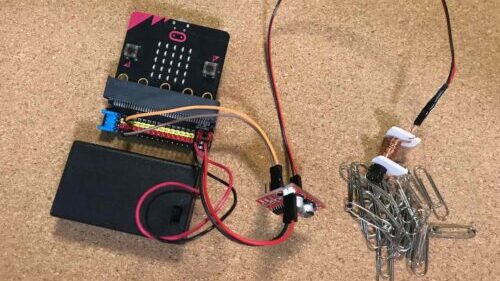
電池ボックスのスイッチをオンにすると、マイクロビットのLEDが、2秒おきに点灯・消灯を繰り返します。
アイコンが表示されている間だけ、電磁石にクリップがくっつくようになりました。
「モータードライブモジュール」はこちら

「M5:bit」はこちら
ロボットアームに電磁石を装着
ロボットアームの先端に電磁石を取り付け、ロボットアームで金属を運べるようにします。
プログラムは以下となります。
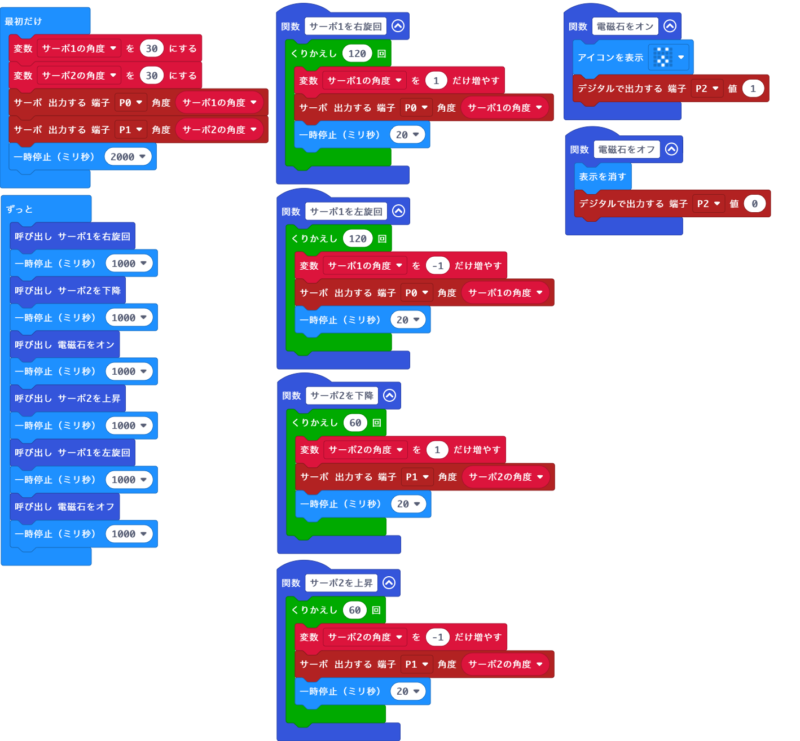
アームが右側に移動して下降した後、電磁石がオンになります。その後、アームは左側に移動して電磁石がオフに。これを繰り返すことで、右側に置いた金属を左側に移動させます。
アームの先端に電磁石を取り付けます。

電磁石の消費電流が非常に大きく、電磁石とサーボモーターを同じ電池で動かすと、サーボモーターの動きがガタガタになってしまったため、電磁石とサーボモーターは別の電池で駆動することとします。

ステップ4: 実験と改良
タスク設定
例えば、テーブルの右側に置いたお皿に、クリップなどの軽い金属を置き、左側のお皿に移動させます。
タスクに基づいたプログラムを作成し、ロボットアームがその動作を実行するようにします。
テストと改良
プログラムを実行し、ロボットアームが正確に動作するかを確認します。
必要に応じてプログラムやアームの構造を調整し、よりスムーズな動きを実現します。
参考リンク
Hackster.ioは、様々な電子工作のプロジェクトが公開されているサイトです。
プログラミングコードがシンタックスハイライト付きで書いてあり、配線の図や実際の写真、動画などが掲載されています。
記事により、情報量の差はありますが、品質は高く、とても参考になるサイトです。
自由研究にぴったり! スクラッチとマイクロビットで作るロボットアーム まとめ
この自由研究を通じて、子供たちはロボット工学とプログラミングの基本を学び、創造力と問題解決能力を伸ばすことができます。
マイクロビットとスクラッチを使ったロボットアームの作成は、楽しくてやりがいのあるプロジェクトであり、子供たちが技術に対する興味を持つきっかけになります。
完成したロボットアームを使って、さらに複雑なタスクに挑戦することもできるでしょう。
子どもが自分の手でロボットを作り上げる喜びを感じながら、学びの楽しさを実感できることを願っています。